Inventor recebe patente para construção de nanorobô
Redação do Site Inovação Tecnológica31/07/2003
 |
A empresa norte-americana Technology Innovations acaba de receber uma patente para uma nova tecnologia de construção de nanorobôs, robôs tão pequenos que serão capazes de manipular células e moléculas grandes. A descoberta poderá preencher uma lacuna entre os métodos atuais de micromanipulação, que não conseguem operar em escalas tão pequenas, e os microscópios de varredura por sonda, que podem manipular até átomos individuais, mas são muito lentos para qualquer aplicação industrial prática.
Embora o título da patente seja "Técnica sem fio para microativação", o princípio de funcionamento dos nanorobôs nada tem a ver com transmissores ou com as tecnologias de comunicação como telefonia celular, BlueTooth ou Wi-Fi. Na verdade, o grande destaque da nova técnica reside na não exigência de circuitos, antenas e mesmo baterias. Os nanorobôs baseiam-se inteiramente em uma liga de níquel e titânio capaz de mudar de tamanho quando submetida ao calor.
Conhecida como SMA ("Shape Memory Alloy": liga com memória de formato), esta liga de níquel e titânio já está disponível no mercado há vários anos e é largamente utilizada em projetos de mini-robôs. O que Ken Clements, o inventor e detentor da nova patente, fez foi aplicar técnicas e equipamentos voltados à nanotecnologia e construir robôs em micro e nanoescala, ativados por um feixe de elétrons emitido por microscópio de varredura por sonda (SPM: "Scanning Probe Microscope").
Um dos principais objetivos da nanotecnologia é o desenvolvimento de ferramentas para a manipulação ou a construção de dispositivos em escala nanométrica (1 nanômetro = 1 bilionésimo de metro). Há duas possibilidades para se atingir esse objetivo: a montagem molecular, trabalhando-se um átomo ou molécula por vez, como a construção de uma parede, com a "pequena" diferença de que cada tijoto seria uma molécula. A segunda opção é a construção de micromecanismos de manipulação, capazes de mover e controlar objetos na escala nanométrica. Os nanorobôs pertencem a esta segunda categoria.
A montagem molecular conta hoje com vários instrumentos, como os microscópios de tunelamento (STM: "Scanning Tunneling Microscope") e de força atômica (AFM: "Atomic Force Microscope"). Esses equipamentos são capazes de posicionar átomos ou moléculas individuais, mas são extremamente lentos para qualquer aplicação prática. Além disso, eles são "precisos demais", o que significa que suas finíssimas pontas não são capazes de lidar com moléculas grandes.
Um enfoque alternativo baseia-se na construção de uma série de ferramentas, uma menor do que a outra. Um ferramenta seria utilizada para construir outra idêntica, mas menor do que ela própria. Esta por sua vez construiria uma ainda menor e assim por diante, até se atingir a escala desejada.
Os microposicionadores convencionais são baseados principalmente em dispositivos eletromagnéticos ou piezoelétricos. Isso os torna grandes, devido à exigência de placas de controle, baterias e fiação até os microbraços robóticos, que são os atuadores propriamente ditos. Isso impede sua miniaturização em seqüência.
Este é o hiato que a nova tecnologia, e sua patente, prometem preencher. E a procura não tem sido pequena: cientistas da maioria das Universidades do mundo e laboratórios de empresas do porte da IBM procuram avidamente por uma saída. O prêmio para a solução do problema será a capacidade de manipulação de moléculas de DNA, nanotubos, nanocristais e mais uma miríade de novos materiais que poderão ser a base de uma nova revolução industrial.
A proposta da Technology Innovations aproveita as propriedades das ligas de níquel e titânio que podem ser dobradas, esticadas ou comprimidas quando estão em temperatura ambiente. Pode-se mesmo utilizar uma barra de liga SMA para dobrar outra barra de liga SMA. A liga fica no formato que a força mecânica lhe der até ser aquecida; nesse momento ela retornará automaticamente ao seu desenho original. Daí o efeito memória que as ligas SMA possuem.
As ligas SMA podem ser fabricadas em forma de película, como as produzidas pela empresa TiNiAlloy Company, medindo apenas 100 nanômetros de espessura, sobre um substrato de silício. A película pode então passar por uma microusinagem por processos de fotolitografia, quando diferentes formatos podem ser desenhados, criando-se praticamente qualquer mecanismo desejado. Uma película dessas tem cerca de 10 vezes mais densidade volumétrica de energia do que os microatudores convencionais, sendo capaz de produzir até 10 joules por centímetro cúbico por ciclo. Mas esse método possui um grande inconveniente: a necessidade de fiação para transmissão da energia que será responsável pelo aquecimento da liga limita esses dispositivos a 100 micra.
A solução apresentada por Clements, ao invés de utilizar fiação que leva energia para a liga, utiliza um feixe de elétrons para focalizar precisamente na liga o calor necessário para seu aquecimento. Pode ser também utilizado um feixe de fótons, como um laser, ou mesmo um feixe de som. Um feixe de elétrons pode ser precisamente focalizado até décimos de um nanômetro, além de poder ser rapidamente movido para uma localização exata, de forma a ativar o dispositivo SMA desejado.
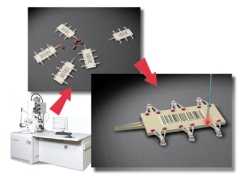
Os protótipos de demonstração mostraram um microrobô criado de uma película de SMA, medindo 2 micra de largura por 10 micra de comprimento, acionado pelo feixe de um microscópio de tunelamento. O microrobô é cerca de 50 vezes menor do que o que é factível de se construir, utilizando-se a atual tecnologia de microatuadores.
O microrobô, posicionado sob um microscópio de tunelamento, pode ter garras capazes de pegar e movimentar objetos tão pequenos quanto 100 nanômetros, o tamanho de uma molécula de DNA.
Pode-ser também movimentar o microrobô em qualquer direção, pelo aquecimento seletivo de suas pernas. Aquecendo-se uma perna de um lado, enquanto a outra permanece fria, e efetuando-se a operação inversa no outro lado do robô, faz com que ele ande na direção desejada. É como uma equipe de remadores movimentando um bote.
Um programa de CAD, conectado ao microscópio, poderá automatizar o movimento do robô, ao direcionar o foco de energia de forma precisa e por meio de uma série de pulsos. O mesmo microscópio utilizado para emitir os pulsos de energia pode ser utilizado para gerar uma imagem do robô e do material no qual ele está trabalhando, provendo um sistema de "feedback" contínuo, como se uma câmera o estivesse filmando.
O inventor propõe várias utilizações da técnica, entre as quais a construção de válvulas médicas 100 vezes menores do que as atuais, a construção de minúsculos instrumentos cirúrgicos e de bio-chips. Mas ele também divaga bastante ao afirmar que a técnica serviria para a fabricação de micro-moldes que poderiam ser partes de uma micro-fábrica ou então de funcionar como sondas que poderiam ser injetadas na corrente sanguínea e reparar tecidos danificados. Ele só se esqueceu de dizer como o feixe de calor irá chegar ao nanorobô sem queimar o paciente.

Nenhum comentário:
Postar um comentário